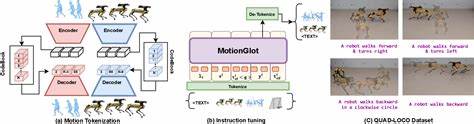
El campo de la generación de movimientos en robótica y animación ha experimentado un crecimiento significativo gracias a la integración de modelos de inteligencia artificial avanzados. En este contexto, MotionGlot emerge como un avance revolucionario al ofrecer una solución capaz de generar movimientos complejos para diversas formas corporales o 'embodiments', desde robots cuadrúpedos hasta cuerpos humanos. Este sistema no solo representa una evolución tecnológica, sino que también marca un punto de inflexión en la manera en la que se aplican técnicas de aprendizaje automático a tareas relacionadas con la simulación y la creación de movimientos. MotionGlot se basa en una propuesta innovadora que adapta los principios y procedimientos de entrenamiento utilizados en grandes modelos de lenguaje (LLMs) para tareas motrices. Tradicionalmente, estos modelos han sido diseñados para mejorar habilidades lingüísticas, sin embargo, los investigadores han descubierto que sus metodologías, como el instruction tuning, pueden ser trasladadas exitosamente a ámbitos como la generación de movimientos.
Esta transferencia de tecnología abre la puerta a modelos que aprenden a interpretar y ejecutar acciones complejas a partir de instrucciones textuales, haciendo posible la generación de movimientos en diferentes cuerpos robóticos con distintas dimensiones y estructuras articulares. Una de las características más destacadas de MotionGlot es su capacidad multi-embodiada, es decir, su habilidad para trabajar con diferentes tipos de representaciones corporales y generar movimientos coherentes y naturales para cada uno de ellos. Por ejemplo, un robot cuadrúpedo con su esquema de movimiento particular puede ser controlado con el mismo modelo que un cuerpo humano, a pesar de las diferencias sustanciales en sus grados de libertad y parámetros cinemáticos. Esta versatilidad es posible gracias a los datasets especialmente diseñados para cada caso y a un enfoque de entrenamiento unificado que les permite compartir aprendizaje y generalizar habilidades motrices. El desarrollo de MotionGlot ha involucrado la creación de dos nuevos conjuntos de datos que constituyen un aporte fundamental para la comunidad científica y técnica.
El primero es un dataset de locomoción cuadrúpeda expertamente controlado que combina cerca de 48,000 trayectorias de movimiento con anotaciones textuales basadas en direcciones, ofreciendo una fuente rica y precisa para el entrenamiento y evaluación del sistema en robots con esta arquitectura. El segundo dataset incluye más de 23,000 indicaciones textuales situacionales para tareas de generación de movimiento humano, facilitando la interpretación contextual y el desempeño en escenarios variados y realistas. Estos recursos han permitido que MotionGlot no solo mejore la precisión en la generación de movimientos, sino que también amplíe su aplicabilidad práctica. En superficies experimentales, el modelo ha sido probado en una serie de seis tareas diferentes, mostrando una mejora promedio del 35.3% en comparación con métodos anteriores.
Estos resultados evidencian la eficiencia y efectividad del enfoque multi-embodiado y basado en instrucciones, posicionándolo como una herramienta valiosa para investigadores y desarrolladores dedicados a la robótica avanzada, la simulación y la animación. Además del aprendizaje y la validación en entornos digitales, MotionGlot ha pasado la prueba del mundo real a través de experimentos en hardware real. Estos experimentos confirman la capacidad del modelo para adaptarse a condiciones dinámicas y ejecutar movimientos complejos con robots físicos, fortaleciendo su idoneidad para aplicaciones industriales, de entretenimiento y de investigación. El impacto de MotionGlot trasciende el campo puramente robótico. Al habilitar la generación de movimientos basados en instrucciones textuales, el modelo abre nuevas posibilidades en interfaces hombre-máquina, donde comandos intuitivos pueden transformar directamente en acciones precisas y naturales de un robot.
Asimismo, en la industria de los videojuegos y la animación digital, MotionGlot puede acelerar la producción de secuencias de movimiento realistas con menos necesidad de intervención manual, optimizando tiempos y costos. En cuanto a la arquitectura técnica, el modelo toma como punto de partida los principios del instruction tuning presente en LLMs para aprender a interpretar indicaciones verbales o escritas que describen el movimiento deseado. Esta técnica consiste en afinar el modelo con instrucciones explícitas que guían su comportamiento, permitiendo mayor control y flexibilidad. La integración de esta metodología en el contexto del movimiento implica procesar textos descriptivos para luego generar las señales de control necesarias en el espacio de acciones del robot o avatar. Diversos desafíos técnicos han sido superados durante el desarrollo de MotionGlot, incluyendo la reconciliación de diferentes espacios de acción, la normalización y estandarización de datos entre cuerpos heterogéneos, y el diseño de representaciones eficientes que preserven la dinámica y física reales de cada sistema.
La solución adoptada y los resultados obtenidos sugieren que futuras investigaciones pueden continuar enriqueciendo este campo mediante modelos aún más generalizados y robustos. En conclusión, MotionGlot representa un avance significativo en la generación de movimiento multi-embodiado, fusionando técnicas emergentes en inteligencia artificial y robótica para ofrecer un enfoque unificado y eficiente. Su capacidad para manejar diversas morfologías corporales y su vinculación con datos textuales hace que este modelo sea especialmente relevante en la actualidad, apuntando hacia un futuro donde las máquinas podrán interpretar y ejecutar una amplia gama de tareas motoras con precisión y naturalidad. Los desarrollos y resultados que aporta MotionGlot ofrecen una base sólida para futuras innovaciones en robótica, animación digital, interacción humana-robot y más allá, consolidando su papel como una herramienta clave en la próxima generación de tecnologías inteligentes.