La robótica avanza constantemente buscando nuevas formas de imitar la naturaleza para superar los desafíos que presentan terrenos difíciles, espacios reducidos o funciones especializadas. Recientemente, un equipo de ingenieros de la Universidad de Georgia Tech ha conseguido un avance significativo, creando un robot suave de tan solo cinco pulgadas que es capaz de saltar hasta tres metros de altura sin utilizar piernas. Este innovador desarrollo no solo impacta por su capacidad para saltar a tanta altura, sino por la forma en que reproduce movimientos complejos inspirados en pequeños organismos, en este caso, los nematodos. Los nematodos, también conocidos como gusanos redondos, son criaturas microscópicas que, a pesar de su tamaño diminuto, tienen habilidades sorprendentes. Viven en múltiples entornos, desde el suelo hasta dentro de organismos vivos, y algunos tienen la capacidad de saltar distancias que superan veinte veces su propia longitud corporal.
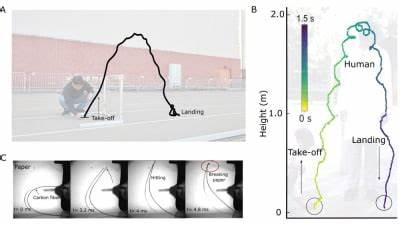
Inspirados por este fenómeno natural, los investigadores de Georgia Tech analizaron videos en alta velocidad que mostraban cómo estos gusanos se contorsionan para propulsarse hacia adelante o hacia atrás, utilizando la energía almacenada al crear ‘‘kinks’’ o dobleces en su cuerpo suave y flexible. El robot desarrollado es un dispositivo compuesto por una varilla de silicona reforzada con una espina de fibra de carbono. El diseño utiliza el principio de almacenamiento y liberación rápida de energía a través de un doblez reversible que, al igual que en el nematodo, permite que el robot salte sin necesidad de extremidades. De esta forma, el movimiento del robot simula un giro gymnástico en el aire, permitiéndole alcanzar alturas considerables y orientarse en distintas direcciones. Este método rompe con el paradigma tradicional de los robots saltadores que dependen de piernas articuladas y motores complejos.
Los desafíos técnicos para lograr que un objeto pueda saltar de manera eficiente sin aniuales mecánicos tradicionales son significativos. Fue necesario crear un sistema elástico que actúe como una especie de ‘‘muelle’’ dentro del material, capaz de acumular energía cinética a partir del movimiento de contorsión y liberar esta energía en fracciones de segundo para propulsar al robot en el aire. La combinación de silicona, por su flexibilidad y resistencia, con el carbono para aportar rigidez en la dirección adecuada, fue crucial para el éxito. Este tipo de robot tiene enormes aplicaciones potenciales, especialmente en el campo del rescate y la exploración. En escenarios donde el terreno es impredecible, accidentado o peligroso para humanos y robots convencionales, la habilidad de saltar múltiples alturas y en varias direcciones brinda una ventaja estratégica significativa.
Por ejemplo, puede atravesar escombros, cruzar obstáculos o ingresar a espacios reducidos donde las ruedas o las patas no podrían maniobrar fácilmente. Además, la capacidad de saltar sin piernas permite que el robot sea más compacto y robusto, al reducir el número de partes móviles susceptibles a roturas o desgaste. La sencillez del diseño también podría facilitar su producción a un costo menor y con mayor durabilidad en comparativa con robots más complejos. El equipo de investigación espera que el principio de doblez reversible y almacenamiento de energía explorado en este robot pueda ser aplicado a otros sistemas elásticos hechos con materiales distintos como plásticos avanzados o compuestos ligeros, ampliando el rango de tamaños y capacidades de futuros robots saltadores. En cuanto a control, la variación en la posición y forma del doblez permite modificar el centro de masa y la dirección de salida, lo que otorga un grado de maniobrabilidad muy alto para estos pequeños dispositivos.
Esta innovación es resultado de una colaboración interdisciplinaria entre expertos en ingeniería biomolecular, mecánica y robótica, quienes combinaron observaciones biológicas con simulaciones computacionales para diseñar y producir la estructura del robot. Durante el proceso, se hicieron pruebas rigurosas para asegurar que el robot pudiera soportar múltiples saltos consecutivos sin perder funcionalidad, demostrando robustez y resistencia comparables a organismos vivos similares. Además de su uso en exploración terrestre, la investigación abre la puerta a aplicaciones espaciales. Recientemente se han desarrollado robots saltadores para misiones lunares y en planetas con baja gravedad, donde saltar sin mecanismos complejos es una forma eficiente de desplazarse. Este nuevo enfoque inspirado en nematodos podría mejorar la agilidad y capacidad de adaptación en estas condiciones extremas.