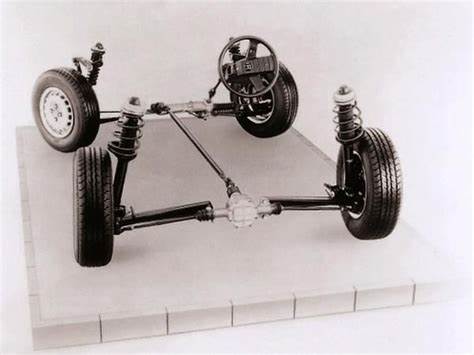
La dirección en las cuatro ruedas, conocida como 4WS por sus siglas en inglés, es una tecnología que, a pesar de no ser ampliamente conocida o adoptada masivamente, representa un avance significativo en la industria automotriz. Su evolución ha estado marcada por innovaciones en ingeniería, ajustes tecnológicos y un intento constante de mejorar la experiencia de conducción, tanto en maniobrabilidad a baja velocidad como en estabilidad a altas velocidades. Los orígenes de esta tecnología se remontan a principios del siglo XX, una época en que los vehículos pesados, especialmente los camiones de gran tonelaje, exploraban formas de mejorar su capacidad de giro y movilidad en espacios reducidos. Camiones estadounidenses pioneros como el Cotta Cottamobile, así como los vehículos Jeffery/Nash Quad Lorry de 3 toneladas, implementaron sistemas rudimentarios de dirección en las cuatro ruedas. Esta innovación permitía que las ruedas traseras se giraran para complementar el movimiento de las delanteras, facilitando giros más cerrados que los posibles con la dirección convencional.
Sin embargo, durante gran parte del siglo XX, esta tecnología permaneció limitada a aplicaciones específicas o anecdóticas, sin llegar a popularizarse en vehículos de consumo masivo. Las razones fueron variadas: la complejidad mecánica añadida, los costos de fabricación, y también la falta de sistemas electrónicos y computacionales capaces de controlar con precisión el comportamiento de las ruedas traseras según las condiciones dinámicas del vehículo. Fue en la década de los años 80 cuando la dirección en las cuatro ruedas comenzó a tener mayor presencia en la industria automotriz, en especial con la llegada de sistemas activos que ajustaban el ángulo de giro trasero basado en la velocidad y la dirección del conductor. Marcas como Honda, Nissan y Mazda se destacaron por implementar estas tecnologías en vehículos de producción, aunque cada una con enfoques distintos. Honda fue pionera en introducir cuatro ruedas dirigibles en vehículos de producción masiva con su legendario Prelude Si de 1988.
La innovación de Honda radicaba en su sistema completamente mecánico, basado en un eje que conectaba la cremallera de dirección delantera con un juego de engranajes planetarios. Este mecanismo permitía variar el ángulo y la fase del giro de las ruedas traseras. A bajas velocidades, las ruedas traseras giraban en la misma dirección que las delanteras, facilitando la maniobrabilidad en espacios estrechos y reduciendo el radio de giro aproximadamente en un 10%. A velocidades más elevadas, las ruedas traseras giraban en sentido opuesto para mejorar la estabilidad durante cambios rápidos de carril o curvas a alta velocidad. Esta solución mecánica fue valorada por críticos automovilísticos de la época por su precisión, sensación y el feedback directo que ofrecía al conductor.
Algunos expertos, como L.J.K. Setright, considerado un referente en periodismo automotriz, llegaron a catalogar la dirección del Prelude con 4WS como una de las mejores en la historia. Paralelamente, Nissan desarrolló su sistema HICAS (High Capacity Actively Controlled Steering), que también utilizaba dirección en las cuatro ruedas pero con un enfoque más avanzado tecnológicamente.
El sistema de Nissan era computarizado y empleaba actuadores hidráulicos controlados electrónicamente para modificar el ángulo de las ruedas traseras. A diferencia del sistema de Honda, el HICAS actuaba principalmente a velocidades elevadas y no a bajas, buscando mejorar la estabilidad en maniobras rápidas y la capacidad de respuesta en curvas. Mazda también incursionó en esta tecnología en los años 80, con prototipos como el MX-02 y en vehículos como el 626 Turbo. Sin embargo, su impacto en el mercado fue limitado y no alcanzó la notoriedad de Honda o Nissan. Aunque la direccionalidad en las cuatro ruedas aportaba claras ventajas en términos de performance y seguridad, su adopción masiva fue limitada durante este periodo.
En buena medida, esto se debió a los costos adicionales asociados con la complejidad mecánica y electrónica, que incrementaban el precio final del vehículo. Además, la economía global, particularmente la revalorización del yen japonés en la segunda mitad de los años 80, encareció los automóviles fabricados en ese país, afectando su competitividad en mercados clave como el estadounidense. A pesar de ello, la tecnología no desapareció. La dirección en las cuatro ruedas encontró un espacio interesante en los vehículos pickup y camiones, donde maniobrar a baja velocidad con cargas pesadas o remolques presenta desafíos especiales. General Motors, por ejemplo, lanzó en la década del 2000 el sistema Quadrasteer en sus pickups Silverado y GMC Sierra.
Este sistema permitía que las ruedas traseras giraran hasta 15 grados en sentido opuesto al de las ruedas delanteras a bajas velocidades para reducir significativamente el círculo de giro, facilitando labores en espacios confinados. También incorporaba un modo para remolque que limitaba el ángulo de giro trasero y evitaba daños por ángulos excesivos. Aunque innovador, el sistema Quadrasteer no alcanzó gran popularidad principalmente por su alto costo, situándose como opción en los niveles más equipados y costosos del catálogo, con un precio adicional cercano a los 5,600 dólares, un monto considerado elevado para la mayoría de compradores de pickups. En la actualidad, la dirección en las cuatro ruedas resurge gracias a los avances en electrónica automotriz, sensores y control computarizado. Muchos fabricantes de vehículos de lujo integran sistemas 4WS para mejorar la conducción y la dinámica del vehículo.
Mercedes-Benz, por ejemplo, equipa modelos eléctricos como el EQS y el EQE con dirección en las cuatro ruedas que permiten no solo una reducción en el radio de giro, sino también maniobras como el llamadas “crabwalk” o desplazamiento lateral, muy útil para sortear obstáculos o realizar maniobras precisas en espacios reducidos. Además, marcas deportivas premium y de alto rendimiento, como Porsche y Audi, utilizan versiones avanzadas de 4WS para mejorar la agilidad, estabilidad y seguridad al enlazar curvas o en situaciones de cambio rápido de dirección. Estos sistemas, apoyados en una red de sensores y controles electrónicos sofisticados, ajustan el ángulo y la fase de las ruedas traseras en tiempo real conforme a la velocidad, el giro del volante y otras variables dinámicas. Con la popularización de los vehículos eléctricos, la dirección en las cuatro ruedas ha encontrado nuevas oportunidades. El diseño modular y la flexibilidad en la arquitectura electrónica de estos vehículos permiten integrar con mayor facilidad sistemas de dirección trasera activa sin sacrificar espacio ni aumentar excesivamente el peso.
Además, mejoras en eficiencia energética y materiales facilitan la implementación de actuadores eléctricos para determinar con precisión los movimientos de las ruedas traseras. Independientemente de las variaciones tecnológicas y de mercado, el principio fundamental de la dirección en las cuatro ruedas permanece intacto: facilitar una mejor maniobrabilidad a velocidades bajas y aumentar la estabilidad y control a velocidades más altas. Esta dualidad responde a necesidades muy concretas de seguridad vial y confort de conducción. En el futuro cercano, se espera que esta tecnología se integre de manera aún más profunda con sistemas avanzados de asistencia a la conducción y conducción autónoma. La dirección trasera activa podría colaborar con sistemas de frenado, aceleración y estabilización, optimizando la trayectoria y la respuesta del vehículo en tiempo real para prevenir accidentes y mejorar la experiencia del usuario.
En conclusión, la dirección en las cuatro ruedas es una tecnología que, a pesar de sus orígenes hace más de un siglo, sigue vigente y en constante evolución. Su historia refleja el constante esfuerzo de la industria automotriz por mejorar la movilidad, la seguridad y el placer de manejo, combinando ingenio mecánico y avances electrónicos. Desde los primeros camiones de principios del siglo XX hasta la sofisticación de los vehículos eléctricos de lujo de hoy, la dirección en las cuatro ruedas demuestra que, aunque las innovaciones pueden atravesar ciclos de entusiasmo y escepticismo, las buenas ideas tecnológicas perduran y encuentran su lugar con el tiempo.